
Signal Processing Techniques for the Integrity of Navigation for Land Users (INLU)
Programme |
Activity |
Status |
Thematic areas |
|---|---|---|---|
TRP |
Completed |
Signalling |
While for the aviation related safety of life services GNSS integrity concepts have been developed and are used in Space Based Augmentation Systems like EGNOS and WAAS, integrity algorithms for non-aviation users have not yet been developed with the same level of maturity. However, new services for land users require integrity information as well. The major difference compared to the airborne user is the threat space the land user is face with: While in the aviation domain mainly system level errors need to be considered, additional sources of error for the land user are local threats like multipath, NLOS tracking, signal blockages and interference.
The INLU activity identifies possible land-user applications and preliminarily selects the most prospective candidates, for which integrity requirements are derived and tailored integrity algorithms are developed. These integrity algorithms are implemented in the INLU testbed. This testbed offers extensive scenario generation capabilities, including trajectory generation, constellation simulation, multipath generation according to the ITU-R-p.681 and other models, as well as NLOS and interference threat generation. The GNSS baseband samples representative for the scenario under test – which are either generated by the testbed itself or recorded using a Space Segment simulator steered by the testbed – are processed in a versatile software receiver, which allows combining various acquisition, tracking, multipath mitigation, consistency check and integrity algorithms. Besides stand-alone PVT solvers, several integration architectures with additional sensors, including tight and ultra-tight coupling with inertial navigation, and algorithms tailored to the train environment are available as well. The INLU testbed also covers means for analyzing the integrity performance of the algorithms under test, which allows first of all to identify the optimal combination of algorithms, second to quantify the achievable protection levels, integrity risks and availabilities for each specific application and threat scenario.
FEATURES
The INLU toolchain is composed of two major building blocks: The scenario generation modules and the processing modules, the latter forming the Positioning and Integrity Performance Evaluator (PIPE).
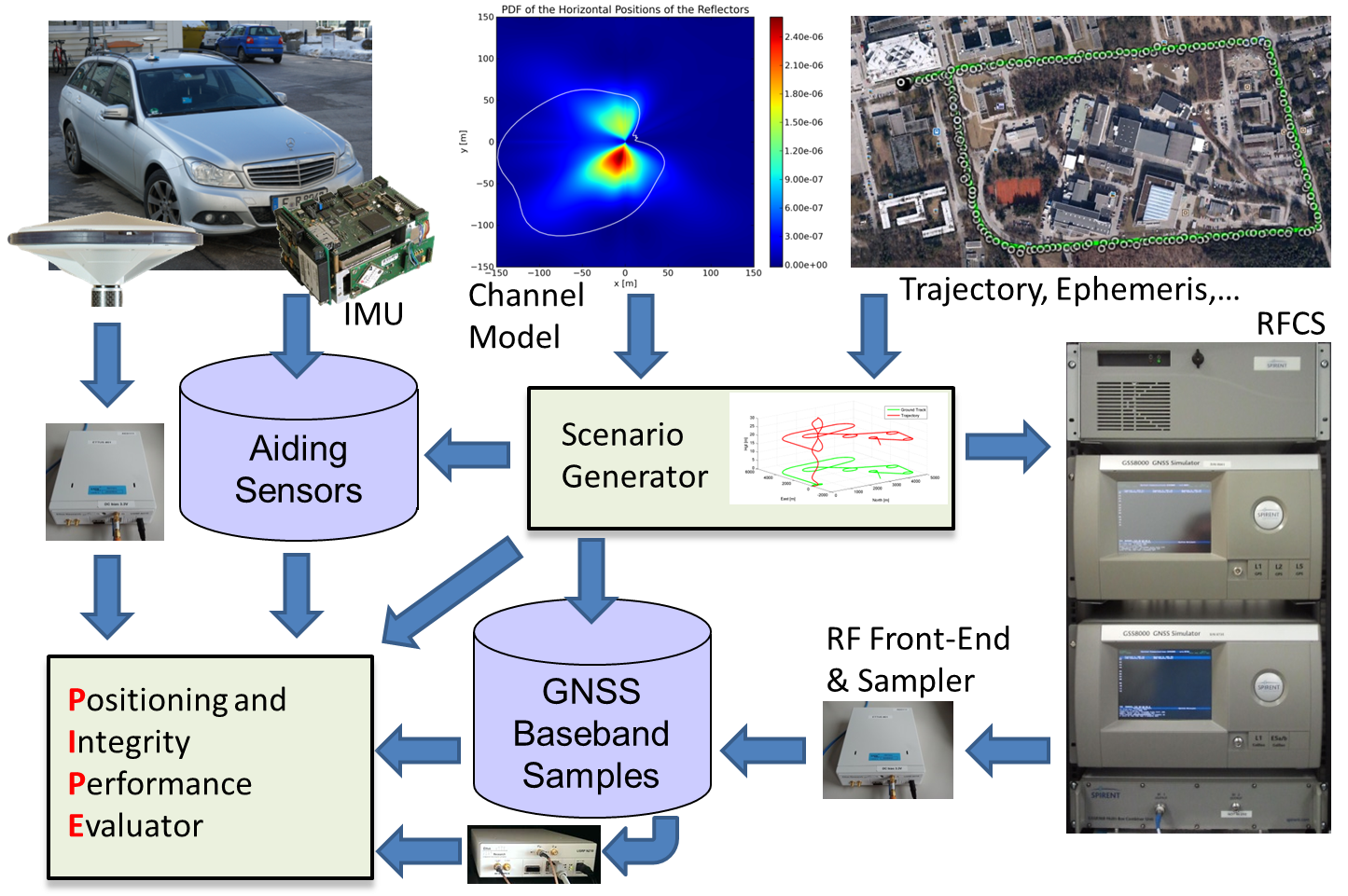
The INLU scenario generation modules are illustrated in the figure below. Based on a user defined trajectory, constellation data, multipath and threat models, the scenario generator generates GNSS baseband samples. Alternatively, the scenario generator can be used to control a Radio Frequency Constellation Simulator (RFCS), which produces a RF signal like it would be available from a GNSS antenna. This signal can be provided to a front-end connected to a sampler, which stores GNSS baseband samples to disc. Furthermore, INLU offers capabilities to generate inertial sensor data, magnetometer data, baro-altimeter data and odometer data. The baseband samples, either generated by the INLU tools, recorded using a RFCS or recorded in test drives, are provided to the PIPE tools for further processing.
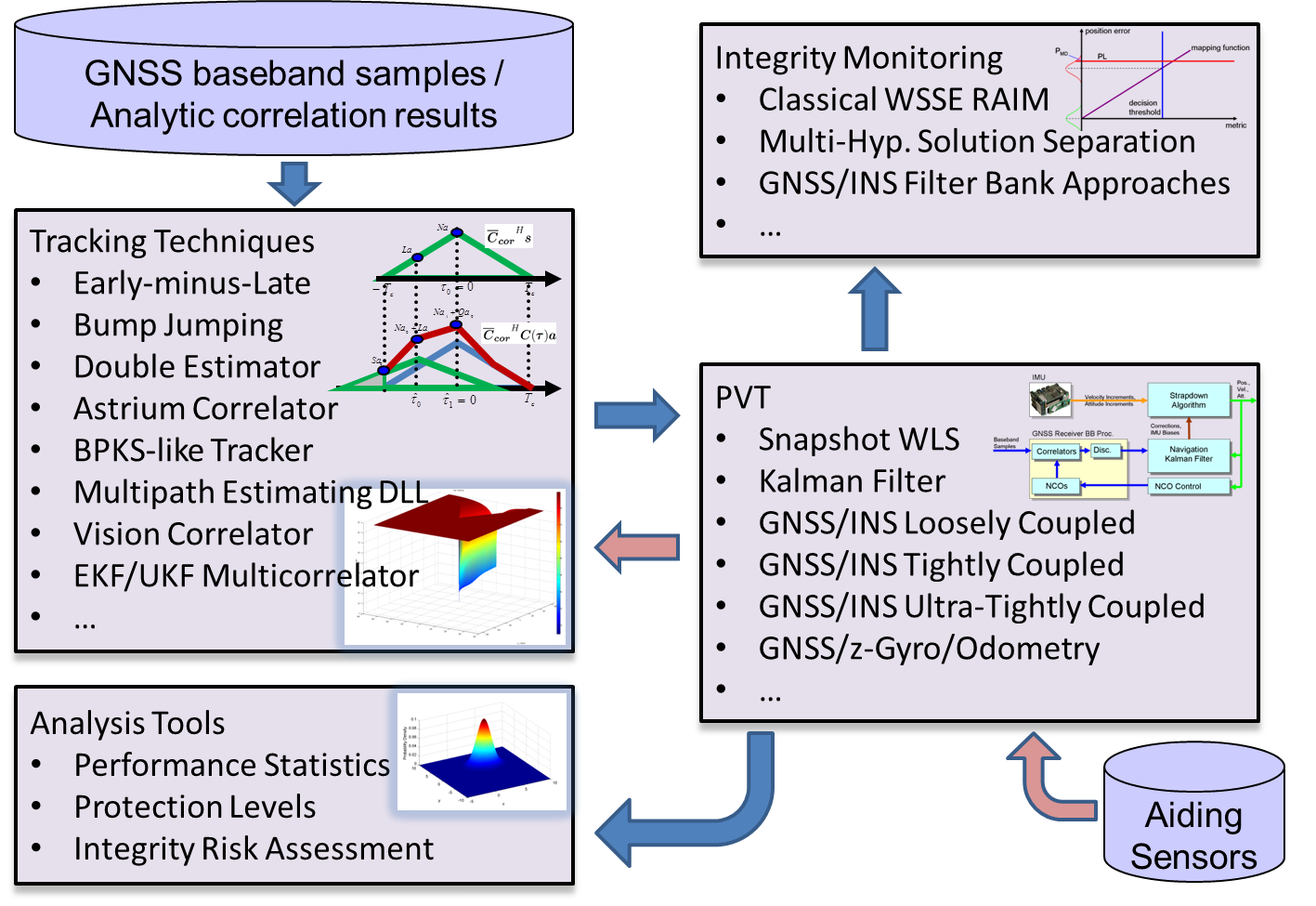
The PIPE building blocks are illustrated in the figure below. A variety of tracking techniques can be used to obtain pseudorange, carrier phase and Doppler measurements. Different consistency checks can be applied to exclude faulty measurements, e.g. in case of NLOS tracking or when a tracker locked to a side peak of a BOC signal. These consistency checks assess e.g. distortions of the correlation function or check for discontinuities in the measurement histories. The measurements that pass these checks are processed in a PVT solver to obtain GNSS position and time. Hereby, a variety of PVT solvers are available, which can be combined with classical RAIM and ARAIM algorithms. Special ARAIM algorithms tailored to the train environment are available. For solvers which integrate the GNSS measurements with additional sensor data, integrity algorithms are available as well, mostly based on filter bank approaches. Finally, the INLU testbed offers various analysis tools to assess the integrity performance of the algorithms under test.
STATUS
The project is completed. The railway parts of the project included the development of a railway multipath environment. In addition, the INLU toolchain (implemented and validated) was used to implement and test tailored PVT and integrity solutions for railway applications utilising track database and odometry. These solutions demonstrated promising performances for the demanding scenarios tested.
CONTRACTORS
Germany
SUBCONTRACTORS
France
PROJECT MANAGERS
CONTRACTOR PROJECT MANAGER
Dr.
Jan Wendel
Airbus Defence and Space GmbH
81663
Munich
DE
ESA PROJECT MANAGER
Rigas
Ioannides
ESTEC
2200
Noordwijk
NL
Last updated date: 14 January 2019
