
Signaling

5G-INRAIL
Status date: Status date: 26 April 20245G-INRAIL will develop a complete end-to-end 5G NR physical layer software demonstrator for railway control communications over satellite. Building on previous work from the above projects, the simulator will use the defined satellite orbit scenarios and frequency bands of interest for FRMCS over satellite, fine-tuning of existing channel models to be made very realistic and specific for the railway-satellite channel.

Satellite Air Interface for Railway Control Communications
Status date: Status date: 26 April 2024SAIRCC will evaluate and demonstrate the performance of a satellite system that can be used as an alternative solution to GSM-R system, with particular interest to ERTMS / ETCS (European Train Control System) on-board applications, while being compliant with safety integrity level equal to SIL4 and relying on NO-SIL high availability communication channels.

Track
Status date: Status date: 26 April 2024TRACK will develop and test the control and management FRMCS protocol stacks, enabling railway control communication via satellite and a full integration with the terrestrial access network. Signalling procedures will be defined and tested, including handshaking, registration, call establishments, priority access, quality of service scheduler, resource management, handovers, outage detections and reporting. The protocols will be 5G compatible to ensure full integration into the FRMCS railway control services.

Disruptive GNSS Receiver Technologies for Future Railway Signalling Applications
Status date: Status date: 20 October 2023The project aims to investigate at new technologies and concepts that can benefit the inclusion of GNSS in Future Railway Signalling Applications. The project will not only look at the alternative technologies – proven and emerging – but also the risks and challenges implementing them into a rail environment, as well as the safety cases and product approvals that would need to be addressed to allow operational deployment.

SODOR
Status date: Status date: 23 February 2023The objective of the proposed activity is to develop a demonstration of a hybrid satellite communications and terrestrial network for use on trains.
GREET
Status date: Status date: 17 February 2023This activity aims to develop a GNSS receiver platform for rail (the GREET Receiver Platform), which will help realize the important potential of GNSS as a component of the on-board multi-sensor train localization unit (TLOBU). Fusion with other sensors (e.g. Inertial Measurement Unit (IMU), tachometer, track geometry, etc.) will be mandatory to mitigate the known impact of local effects on GNSS performance and allow the use of a localization unit, with the required safety level, across all the European rail network, from main lines to regional lines, from mountainous areas to urban environments.
CertiPro - Certifiable Railway Trackworker Individual Protection
Status date: Status date: 17 February 2023In this truly European project, an innovative railway track worker protection system will be evaluated for its reliability and its ability to enhance the safety of railway track workers. The goal is to demonstrate the safety capabilities of the track worker protection system in a real environment, integrated into the challenging infrastructure of a railway operator in Italy.
RX4RAIL
Status date: Status date: 17 February 2023Rx4Rail Project aims to design and develop a GNSS Receiver Chain Technology for Future Railways. The developed receiver is a dual frequency (L1/L5) multi constellation (Galileo/GPS) GNSS receiver based on state of art hardware technology, and is fully configurable. It is based on GNSS positioning performance requirements to support target ETCS functions and implements Integrity concepts suitable for evolutionary ETCS.

SBS RAILS Phase 2.1 - Technology Demonstrator for the Certification of a Satellite-based ERTMS L2 Regional Line Solution
Status date: Status date: 01 January 2023SBS RailS Phase 2.1 aims to design, build and test the first European Demonstrator of Train Control System based on the ERTMS L2 standard operating with satellite navigation and a satcom multi-bearer telecom service. The demonstrator will be tested on the Pinerolo-Sangone pilot line in collaboration with RFI that in the meantime has activated the certification process with the safety agencies.
SEMOR 3D
Status date: Status date: 08 December 2022SEMOR-3D aims to include modelling techniques to overcome the problem of lack of precision in hostile railway environment as can be met in mountains or valleys where the GNSS satellites can lose visibility. In Italy as in the main railway network of centre Europe the percentage rails that runs in mountain area is relevant, so, adopting 3D techniques will extend the use of SEMOR and enhance the worker protection. The present proposal will aim to develop a SEMOR-3D prototype able to improve dramatically workers safety and reducing delay in train traffic.
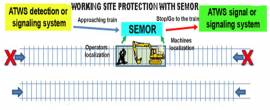
SEMOR
Status date: Status date: 31 October 2022To set up a Worksite Protection System prototype introducing individual protection to improve workers safety and cutting delay in train traffic movements due to the limitation of the process based on current ATWS.
AGIS4RAIL
Status date: Status date: 06 October 2022AGIS4RAIL is a very innovative solution to obtain the train absolute position exploiting a multi-sensor platform based on GNSS.
AGIS4RAIL operates within ERTMS/ETCS signalling system, aiming at providing an economic solution to increase the efficiency of the traffic management. One main issue of the current system is represented by the Start of Mission (SOM) along the track. Infact, once the train loses its position, it has to move at low speed until it reads the next balise in order to re-establishing its position; after that the train can proceed at the expected speed. This process could lead to delays that are not negligible with respect to train separation, affecting also other trains in the line.
AGIS4RAIL acts as a gap filler to determine the train position without waiting for the next balise, reducing the time required to reach full speed.

VOLIERA - Video Odometry with LIDAR and EGNSS for ERTMS Applications
Status date: Status date: 06 February 2020VOLIERA aims to develop an innovative multi-sensor component aimed at providing relative and absolute position and odometry information suitable for the railway environment.
3TIMS - ERTMS Level 3 Train Integrity Monitoring Solution
Status date: Status date: 31 May 2019The project “3TIMS” focuses on the on-board monitoring of the completeness of freight trains, because the lack of electrical power supply at its wagons prevented a safe solution so far. 3TIMS involves rail stakeholders and investigates fusion of three technologies (GNSS with IMU, Brake Pipe monitoring, M2M radio links), to establish the design and consolidating it by a proof-of-concept analysis.
Iris4Rail - Iris for Railway Communications
Status date: Status date: 24 May 2019The Iris for Railway Communications study aims to perform a suitability assessment of the Iris service solution, specifically defined for the aeronautics domain, in the railway operational scenario.

Sim4Rail
Status date: Status date: 06 December 2018The Sim4Rail activity aims to specify and develop highly controllable laboratory tools for a testbed to test and support the development of PNT (Positioning, Navigation and Timing) technologies for railway signalling including applications in the European Rail Traffic Management System (ERTMS) / European Train Control System (ETCS). The testbed will support testing under both nominal and extreme conditions, including support for fault-injection testing.

CAPRESE - Techniques Supporting Resilience for High Integrity Train Control Applications
Status date: Status date: 05 November 2018The objective of the CAPRESE project is to assess, design and test techniques for improving the robustness of carrier phase measurements for use in GNSS positioning for virtual balise detection in ERTMS.

SAT4TRAIN
Status date: Status date: 10 October 2018The main objective of Sat4Train is to develop a Multi Link Communication Platform (MLCP) able to use all the available terrestrial and satellite public communication services providing an innovative solution, especially for regional and in general low-traffic lines, where dedicated networks (i.e. GSM-R) are not economically sustainable.

STEMS
Status date: Status date: 10 October 2018The STEMS project will review whether using GNSS with SBAS corrections is suitable for use in the EU’s ERTMS system. This activity will focus on the current generation of GPS L1-only SBAS, addressing its suitability for the virtual balise detection in ERTMS and its cross-acceptance by railway safety authorities by 2020.
Signal Processing Techniques for the Integrity of Navigation for Land Users (INLU)
Status date: Status date: 26 February 2018INLU is a versatile testbed for integrity algorithms for land users (including railway users). It includes signal and threat generation capabilities at sample level, a versatile software receiver which allows combining various acquisition, tracking, PVT, multipath mitigation, consistency check and integrity algorithms, and means for analyzing the integrity performance of the algorithms under test. Part of the activity is dedicated to assessing the integrity performance of algorithms in the railway environment for application in satellite-based train control systems.
RAILSAFE - Innovative Satellite-based Position, Navigation and Timing Concepts for New Railway Safety of Life Applications
Status date: Status date: 21 February 2018The RAILSAFE project is aimed at exploring how different safety-enabled GNSS Augmentation techniques (such as SBAS, GBAS or RAIM) can be used or adapted to be used in the railway domain, thus fostering the adoption of GNSS technologies in a wider range of applications and contributing to the creation of the aforementioned business opportunities, as an input to a GNSS roadmap for railways.

EMUSER - ENHANCED MULTI-SENSOR DATA HANDLER FOR RAILWAYS
Status date: Status date: 01 February 2016EMUSER is an innovative obstacle detection system integrated with a satellite Broad Band link for the safety of active level crossings.
EMUSER provides increased resilience in case of natural disasters or damages to the rail infrastructure. It can be installed in areas that are uncovered by conventional communication networks.
3INSAT
Status date: Status date: 09 March 20153InSat is a project aiming at developing and verifying a new satellite-based platform, based on the ASTS ERTMS system, to support the train localisation function. This satellite supported solution is not yet available on the market because of the very challenging safety requirements (Safety Integrity Level 4 SIL4 requirement) that a railway signalling system shall comply with.
SafeRail
Status date: Status date: 14 January 2015The objective of SafeRail is to improve the safety at Rail Level Crossings (RLC). In terms of accident prevention, RLC are demanding spots since two disparate transportation systems are intersecting (road, rail respectively) and neither of them completely controls the situation. In response to this, SafeRail provides a flexible and secure solution at a moderate price, using latest advancements in satellite technology.

LeCross
Status date: Status date: 10 September 2014The LeCross study assessed the added value and feasibility of an integrated service solution to improve safety at railway level crossings through the use of added-value space-based technologies, systems and capabilities.

SATCOM Rail
Status date: Status date: 25 July 2013The SATCOM rail project addresses the specification of a framework for the introduction and authorisation of Satellite Communications in support of railway safety and liability critical applications and services.
EGNOS Controlled Railway Equipment (ECORAIL)
Status date: Status date: 09 February 2006The EGNOS Controlled Railway Equipment (ECORAIL) project deals with the implementation of satellite navigation into the railway domain to demonstrate the feasibility and benefits of GNSS in combination with the European Train Control and Rail Traffic Management System (ETCS/ERTMS).
RadioCompass
Status date: Status date: 08 February 2006The main objective of the RadioCompass project has been to develop and test an innovative system for the purpose of high-precision/high-integrity train navigation and attitude determination.
Railway User Navigation Equipment (RUNE)
Status date: Status date: 27 July 2005The primary objective is to demonstrate the improvement of the train self-capability in determining its own position and velocity, with a limited or no support from the track side, and to show that the equipment can comply with the European Railway Train Management System (ERTMS) requirements.
INTEGRAIL - GNSS-1 Rail User Navigation Equipment
Status date: Status date: 01 June 2004The aim of INTEGRAIL is to open the way for profitable use of the EGNOS signal in safety-critical railway traffic management and control.
LOCOLOC
Status date: Status date: 25 January 2004The main objective of LOCOLOC is the development and demonstration of a complete very low cost fail-safe train navigation and integrity system based on the Global Navigation Satellite System (GNSS), focusing on speed and acceleration, as well as a service centre to complement LOCOPROL, a related project launched by the European Commission.
